I am following this paper here using de Casteljau's Algorithm http://www.cgafaq.info/wiki/B%C3%A9zier_curve_evaluation and I have tried using the topic Drawing Bezier curves using De Casteljau Algorithm in C++ , OpenGL to help. No success.
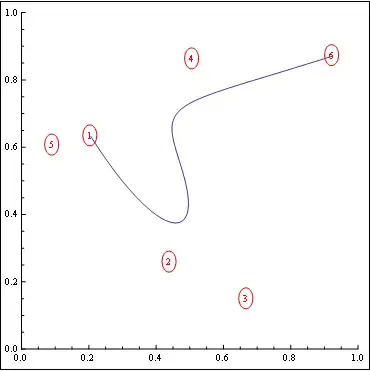
My bezier curves look like this when evaluated
As you can see, even though it doesn't work the wanted I wanted it to, all the points are indeed on the curve. I do not think that this algorithm is inaccurate for this reason.
Here are my points on the top curve in that image: (0,0) (2,0) (2,2) (4,2) The second curve uses the same set of points, except the third point is (0,2), that is, two units above the first point, forming a steeper curve.
Something is wrong. I should put in 0.25 for t and it should spit out 1.0 for the X value, and .75 should always return 3. Assume t is time. It should progress at a constant rate, yeah? Exactly 25% of the way in, the X value should be 1.0 and then the Y should be associated with that value.
Are there any adequate ways to evaluate a bezier curve? Does anyone know what is going on here?
Thanks for any help! :)
EDIT------
I found this book in a google search http://www.tsplines.com/resources/class_notes/Bezier_curves.pdf and here is the page I found on explicit / non-parametric bezier curves. They are polynomials represented as bezier curves, which is what I am going for here. Here is that page from the book:
Anyone know how to convert a bezier curve to a parametric curve? I may open a different thread now...
EDIT AGAIN AS OF 1 NOVEMBER 2011-------
I've realized that I was only asking the question about half as clear as I should have. What I'm trying to build is like Maya's animation graph editor such as this http://www.youtube.com/watch?v=tckN35eYJtg&t=240 where the bezier control points that are used to modify the curve are more like tangent modifiers of equal length. I didn't remember them as being equal length, to be honest. By forcing a system like this, you can insure 100% that the result is a function and contains no overlapping segments.
I found this, which may have my answer http://create.msdn.com/en-US/education/catalog/utility/curve_editor

{kind=link}