Update: Added four point perspective transform.
I have skipped perspective transform as the question is about finding right corners.
You can skip the loop by getting contour with maximum area then processing it. Some blurring may help it further. Press Esc button to get next image output.
Another useful method, how to find corners points of a shape in an image in opencv?
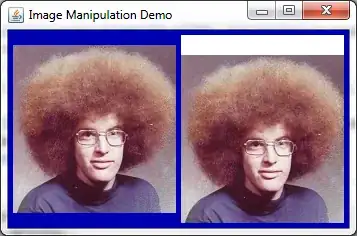
Ouput Images


Code
"""
Task: Detect card corners and fix perspective
"""
import cv2
import numpy as np
img = cv2.imread('resources/KSuVq.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret,thresh = cv2.threshold(gray,127,255,0)
cv2.imshow('Thresholded original',thresh)
cv2.waitKey(0)
## Get contours
contours,h = cv2.findContours(thresh,cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)
## only draw contour that have big areas
imx = img.shape[0]
imy = img.shape[1]
lp_area = (imx * imy) / 10
#################################################################
# Four point perspective transform
# https://www.pyimagesearch.com/2014/08/25/4-point-opencv-getperspective-transform-example/
#################################################################
def order_points(pts):
# initialzie a list of coordinates that will be ordered
# such that the first entry in the list is the top-left,
# the second entry is the top-right, the third is the
# bottom-right, and the fourth is the bottom-left
rect = np.zeros((4, 2), dtype = "float32")
# the top-left point will have the smallest sum, whereas
# the bottom-right point will have the largest sum
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# now, compute the difference between the points, the
# top-right point will have the smallest difference,
# whereas the bottom-left will have the largest difference
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
# return the ordered coordinates
return rect
def four_point_transform(image, pts):
# obtain a consistent order of the points and unpack them
# individually
rect = order_points(pts)
(tl, tr, br, bl) = rect
# compute the width of the new image, which will be the
# maximum distance between bottom-right and bottom-left
# x-coordiates or the top-right and top-left x-coordinates
widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
maxWidth = max(int(widthA), int(widthB))
# compute the height of the new image, which will be the
# maximum distance between the top-right and bottom-right
# y-coordinates or the top-left and bottom-left y-coordinates
heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightA), int(heightB))
# now that we have the dimensions of the new image, construct
# the set of destination points to obtain a "birds eye view",
# (i.e. top-down view) of the image, again specifying points
# in the top-left, top-right, bottom-right, and bottom-left
# order
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# compute the perspective transform matrix and then apply it
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# return the warped image
return warped
#################################################################
## Get only rectangles given exceeding area
for cnt in contours:
approx = cv2.approxPolyDP(cnt,0.01 * cv2.arcLength(cnt, True), True)
## calculate number of vertices
#print(len(approx))
if len(approx) == 4 and cv2.contourArea(cnt) > lp_area:
print("rectangle")
tmp_img = img.copy()
cv2.drawContours(tmp_img, [cnt], 0, (0, 255, 255), 6)
cv2.imshow('Contour Borders', tmp_img)
cv2.waitKey(0)
tmp_img = img.copy()
cv2.drawContours(tmp_img, [cnt], 0, (255, 0, 255), -1)
cv2.imshow('Contour Filled', tmp_img)
cv2.waitKey(0)
# Make a hull arround the contour and draw it on the original image
tmp_img = img.copy()
mask = np.zeros((img.shape[:2]), np.uint8)
hull = cv2.convexHull(cnt)
cv2.drawContours(mask, [hull], 0, (255, 255, 255), -1)
cv2.imshow('Convex Hull Mask', mask)
cv2.waitKey(0)
# Draw minimum area rectangle
tmp_img = img.copy()
rect = cv2.minAreaRect(cnt)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(tmp_img, [box], 0, (0, 0, 255), 2)
cv2.imshow('Minimum Area Rectangle', tmp_img)
cv2.waitKey(0)
# Draw bounding rectangle
tmp_img = img.copy()
x, y, w, h = cv2.boundingRect(cnt)
cv2.rectangle(tmp_img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow('Bounding Rectangle', tmp_img)
cv2.waitKey(0)
# Bounding Rectangle and Minimum Area Rectangle
tmp_img = img.copy()
rect = cv2.minAreaRect(cnt)
box = cv2.boxPoints(rect)
box = np.int0(box)
cv2.drawContours(tmp_img, [box], 0, (0, 0, 255), 2)
x, y, w, h = cv2.boundingRect(cnt)
cv2.rectangle(tmp_img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow('Bounding Rectangle', tmp_img)
cv2.waitKey(0)
# determine the most extreme points along the contour
# https://www.pyimagesearch.com/2016/04/11/finding-extreme-points-in-contours-with-opencv/
tmp_img = img.copy()
extLeft = tuple(cnt[cnt[:, :, 0].argmin()][0])
extRight = tuple(cnt[cnt[:, :, 0].argmax()][0])
extTop = tuple(cnt[cnt[:, :, 1].argmin()][0])
extBot = tuple(cnt[cnt[:, :, 1].argmax()][0])
cv2.drawContours(tmp_img, [cnt], -1, (0, 255, 255), 2)
cv2.circle(tmp_img, extLeft, 8, (0, 0, 255), -1)
cv2.circle(tmp_img, extRight, 8, (0, 255, 0), -1)
cv2.circle(tmp_img, extTop, 8, (255, 0, 0), -1)
cv2.circle(tmp_img, extBot, 8, (255, 255, 0), -1)
print("Corner Points: ", extLeft, extRight, extTop, extBot)
cv2.imshow('img contour drawn', tmp_img)
cv2.waitKey(0)
#cv2.destroyAllWindows()
## Perspective Transform
tmp_img = img.copy()
pts = np.array([extLeft, extRight, extTop, extBot])
warped = four_point_transform(tmp_img, pts)
cv2.imshow("Warped", warped)
cv2.waitKey(0)
cv2.destroyAllWindows()
References
https://docs.opencv.org/4.5.0/dd/d49/tutorial_py_contour_features.html
https://www.pyimagesearch.com/2016/04/11/finding-extreme-points-in-contours-with-opencv/
https://www.pyimagesearch.com/2014/08/25/4-point-opencv-getperspective-transform-example/
















