I have some trouble plotting the image which is in my head. I want to visualize the Kernel-trick with Support Vector Machines. So I made some two-dimensional data consisting of two circles (an inner and an outer circle) which should be separated by a hyperplane. Obviously this isn't possible in two dimensions - so I transformed them into 3D. Let n be the number of samples. Now I have an (n,3)-array (3 columns, n rows) X of data points and an (n,1)-array y with labels. Using sklearn I get the linear classifier via
clf = svm.SVC(kernel='linear', C=1000)
clf.fit(X, y)
I already plot the data points as scatter plot via
plt.scatter(X[:, 0], X[:, 1], c=y, s=30, cmap=plt.cm.Paired)
Now I want to plot the separating hyperplane as surface plot. My problem here is the missing explicit representation of the hyperplane because the decision function only yields an implicit hyperplane via decision_function = 0. Therefore I need to plot the level set (of level 0) of an 4-dimensional object.
Since I'm not a python expert I would appreciate if somebody could help me out! And I know that this isn't really the "style" of using a SVM but I need this image as an illustration for my thesis.
Edit: my current "code"
import numpy as np
import matplotlib.pyplot as plt
from sklearn import svm
from sklearn.datasets import make_blobs, make_circles
from tikzplotlib import save as tikz_save
plt.close('all')
# we create 50 separable points
#X, y = make_blobs(n_samples=40, centers=2, random_state=6)
X, y = make_circles(n_samples=50, factor=0.5, random_state=4, noise=.05)
X2, y2 = make_circles(n_samples=50, factor=0.2, random_state=5, noise=.08)
X = np.append(X,X2, axis=0)
y = np.append(y,y2, axis=0)
# shifte X to [0,2]x[0,2]
X = np.array([[item[0] + 1, item[1] + 1] for item in X])
X[X<0] = 0.01
clf = svm.SVC(kernel='rbf', C=1000)
clf.fit(X, y)
plt.scatter(X[:, 0], X[:, 1], c=y, s=30, cmap=plt.cm.Paired)
# plot the decision function
ax = plt.gca()
xlim = ax.get_xlim()
ylim = ax.get_ylim()
# create grid to evaluate model
xx = np.linspace(xlim[0], xlim[1], 30)
yy = np.linspace(ylim[0], ylim[1], 30)
YY, XX = np.meshgrid(yy, xx)
xy = np.vstack([XX.ravel(), YY.ravel()]).T
Z = clf.decision_function(xy).reshape(XX.shape)
# plot decision boundary and margins
ax.contour(XX, YY, Z, colors='k', levels=[-1, 0, 1], alpha=0.5, linestyles=['--','-','--'])
# plot support vectors
ax.scatter(clf.support_vectors_[:, 0], clf.support_vectors_[:, 1], s=100,
linewidth=1, facecolors='none', edgecolors='k')
################## KERNEL TRICK - 3D ##################
trans_X = np.array([[item[0]**2, item[1]**2, np.sqrt(2*item[0]*item[1])] for item in X])
fig = plt.figure()
ax = plt.axes(projection ="3d")
# creating scatter plot
ax.scatter3D(trans_X[:,0],trans_X[:,1],trans_X[:,2], c = y, cmap=plt.cm.Paired)
clf2 = svm.SVC(kernel='linear', C=1000)
clf2.fit(trans_X, y)
ax = plt.gca(projection='3d')
xlim = ax.get_xlim()
ylim = ax.get_ylim()
zlim = ax.get_zlim()
### from here i don't know what to do ###
xx = np.linspace(xlim[0], xlim[1], 3)
yy = np.linspace(ylim[0], ylim[1], 3)
zz = np.linspace(zlim[0], zlim[1], 3)
ZZ, YY, XX = np.meshgrid(zz, yy, xx)
xyz = np.vstack([XX.ravel(), YY.ravel(), ZZ.ravel()]).T
Z = clf2.decision_function(xyz).reshape(XX.shape)
#ax.contour(XX, YY, ZZ, Z, colors='k', levels=[-1, 0, 1], alpha=0.5, linestyles=['--','-','--'])
Desired Output
I want to get something like that. In general I want to reconstruct what they do in this article, especially "Non-linear transformations".

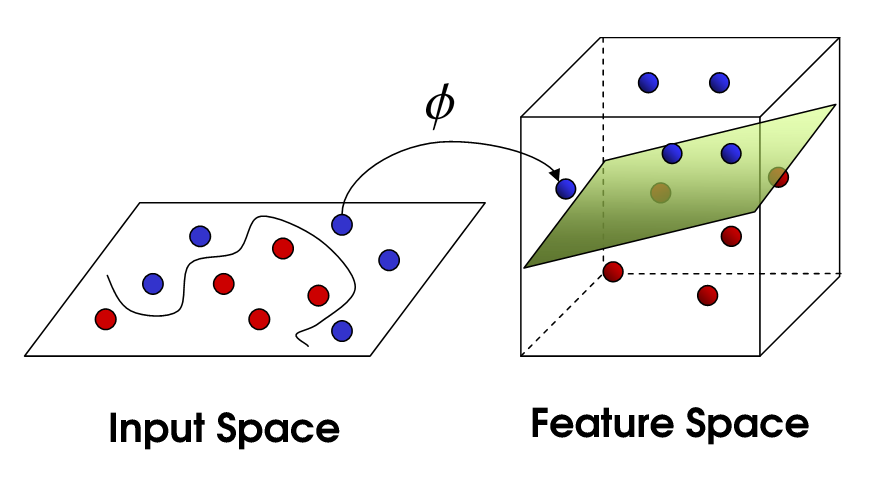{kind=link}