Let the circles have centers with coordinates:

and let the corresponding radii, you have computed, be:
respectively. So it looks like you are looking for the point  and a scaling factor with the following property:
and a scaling factor with the following property:

Equivalently, we need to to find a point in the plane which is the common intersection point of the three circles, obtained by re-scaling the radii of the original circles by a common factor k, or in mathematical notation, we need to solve the system

It is clear that the systems above and the property written before the system are equivalent.
To simplify things, square both sides of each equation from the system:
By Pythagoras' theorem, write
That is why, in explicit formulas, the system of three squared equations above, is in fact the quadratic system of equations:
which, after moving the term from the right-hand side of each equation to the left-hand side, becomes:
Expand all the squared differences in each equation and reorder the terms:
To simplify this system, subtract the second equation from the first, then subtract the third equation from the second and keep one of the quadratic equations, let's say keep the first quadratic equation:
The idea for finding the solution of this system, is the following:
To simplify the notation and the expressions, we can use a bit of notation from linear algebra. Define the following two by two matrix and two by one column-vectors:
and when we multiply the latter matrix equation by the inverse matrix of M:
Let us also write in matrix notation
And finally, the algorithm for finding the intersection point of the three circles, after scaling with an appropriate scaling factor, can be formulated as follows:
Observe that the quadratic equation has two solutions for z. The one I chose, with minus, is the first point of intersection whenever the three circles are external to each and with initial non-intersecting radii. There is also a second intersection point which is the one corresponding to a plus solution for z. If you have the information from a fourth tower available, then you will be able to pick the right point and possibly you may be even able to linearize the problem completely. But with this available data only, you have two solutions.
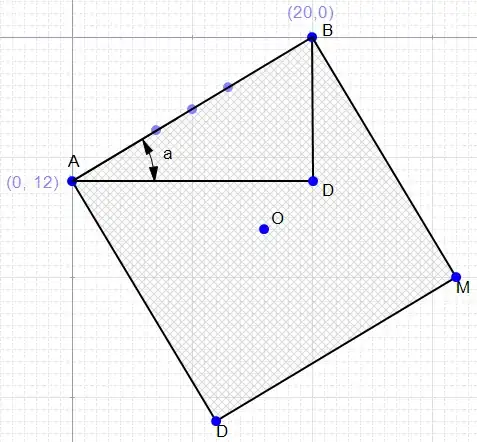
I tested the algorithm with the following hand-made example:
x1 = 0; y1 = 0; r1 = sqrt(13)/3;
x2 = 5; y2 = 1; r2 = sqrt(13)/3;
x3 = 3; y3 = 7; r3 = sqrt(17)/3;
and it ouputs the right location
x = 2; y = 3;
and scaling factor k = 3.
I implemented it in Matlab/Octave because I am comfortable with the linear algebra there:
function [xy, k] = location_scaled(x1, y1, r1, x2, y2, r2, x3, y3, r3)
M = 2*[x2 - x1 y2 - y1;
x3 - x2 y3 - y2];
A = [r1^2 - r2^2;
r2^2 - r3^2];
B = [x2^2 + y2^2 - x1^2 - y1^2;
x3^2 + y3^2 - x2^2 - y2^2];
A = M\A;
B = M\B;
a = A'*A;
b = 2*B'*A - 2*[x1 y1]*A - r1^2;
c = [x1 y1]*[x1; y1] - 2*[x1 y1]*B + B'*B;
k = (- b - sqrt(b^2 - 4*a*c)) / (2*a);
xy = k*A + B;
k = sqrt(k);
end
And here is the python version:
import numpy as np
def location_scaled(x1, y1, r1, x2, y2, r2, x3, y3, r3):
M = 2*np.array([[x2 - x1, y2 - y1],
[x3 - x2, y3 - y2]])
A = np.array([r1**2 - r2**2,
r2**2 - r3**2])
B = np.array([x2**2 + y2**2 - x1**2 - y1**2,
x3**2 + y3**2 - x2**2 - y2**2])
M = np.linalg.inv(M)
A = M.dot(A)
B = M.dot(B)
x1_y1 = np.array([x1, y1])
a = A.dot(A)
b = 2*B.dot(A) - 2*x1_y1.dot(A) - r1**2
c = x1*x1 + y1*y1 - 2*x1_y1.dot(B) + B.dot(B)
k = (- b - np.sqrt(b*b - 4*a*c)) / (2*a);
return k*A + B, np.sqrt(k)





















