I am using the omnidirectional camera module in OpenCV to find depth maps from input stereo images. I am getting the disparity maps like this:
However I want to redistort this particular image so that it looks like the original input image like this:
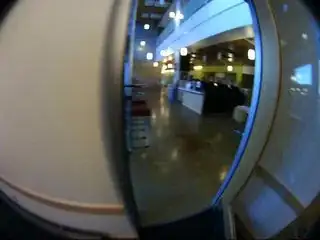
That is it should look like the camera's original field of view. Can anyone tell me how to re-distort a particular image?