I am posting this question after not getting any sort of help across the web and reading many articles and tutorials. I ended up asking questions with hope of getting guided. DESPERATE FOR HELP.
What i want: 1) I want to build a R/C tank. 2) Basically its not controlled by a remote control but i want control by a laptop.(i could write a c++ or c# program).
What i know: 1) I know how to develop a development board. (i want to develop my own, not use arduino) 2) I know c++ and assembly very well. 3) I know about AVR's ALU, Memories(all 3), Stack, Interrupts, IO Operations well. 4) I know theory about how SPI, RS232, UART works.
PROBLEMS: (I have many questions, but most important are) 1) B/c i have made my own board. How can i transfer my program(hex file) to my board(i seek practical and physical implementation, not theory please)(i know about a 6-pin ISP but not clear about practical implementation) 2) After it, how can i make wireless communication b/w my AVR and laptop.(hardware device?)(SPI, RS232, UART?)
MAIN CONFUSION: 1) I cannot help myself differentiating or relating SPI, RS232 and UART. I know these are used for serial communication between devices but how?(which is used when and why and how)(appropriate hardware for transmitting device and receiving device)
THING TO KNOW: 1) I haven't started making my board and programming it because i think i should learn everything first and then do it in a one go. OR should i start practical work and things get easier automatically?? 2) I learnt a tutorial series on Serial Communication from http://maxembedded.com/2013/09/serial-communication-introduction/ the starting 5 topics leaving the last one(I2C). Am i missing something there?
I hope everything is clear, and waiting for a good-men's words.
Note: I am already very misguided and lost, so i want experienced and expert's guidance. Many Many Many Many Thanks in Advance.
MY BOARD LOOKS LIKE: http://www.robotplatform.com/howto/dev_board/schematic_l/38.jpg
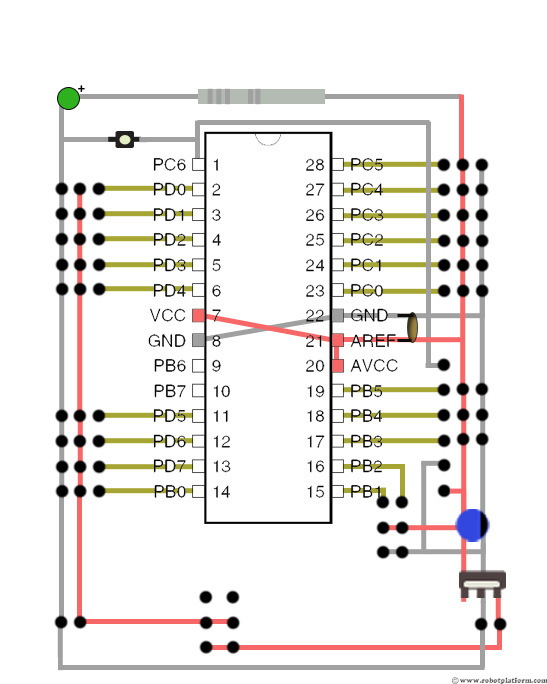{kind=link}