Try checking whether a pixel is not zero - it turns out those pixels have a value of 255 after thresholding, as it is a grayscale image after all.
The threshold seems to be wrong also, but I don't really know what you want to see (display it with imshow - it isn't just the circle). And your code matches the number '3' in the bottom left corner, therefore the ROI matrix indices are invalid in your example.
EDIT:
After playing around with the image, I ended up using a different approach. I used the SimpleBlobDetector and did an erosion on the image before, so the region you're interested in remains connected. For the blob detector the program inverts the image first. (You may want to read a SimpleBlobDetector tutorial as I did, parts of the code are based on that page - many thanks to the author!)
The following code displays the procedure step by step:
import cv2
import numpy as np
# Read image
gimg = cv2.imread("test2.jpg", cv2.IMREAD_GRAYSCALE)
# Invert the image
im_inv = 255 - gimg
cv2.imshow("Step 1 - inverted image", im_inv)
cv2.waitKey(0)
# display at a threshold level of 50
thresh = 45
im_bw = cv2.threshold(im_inv, thresh, 255, cv2.THRESH_BINARY)[1]
cv2.imshow("Step 2 - bw threshold", im_bw)
cv2.waitKey(0)
# erosion
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE,(10,10))
im_bw = cv2.erode(im_bw, kernel, iterations = 1)
cv2.imshow('Step 3 - erosion connects disconnected parts', im_bw)
cv2.waitKey(0)
# Set up the detector with default parameters.
params = cv2.SimpleBlobDetector_Params()
params.filterByInertia = False
params.filterByConvexity = False
params.filterByCircularity = False
params.filterByColor = False
params.minThreshold = 0
params.maxThreshold = 50
params.filterByArea = True
params.minArea = 1000 # you may check with 10 --> finds number '3' also
params.maxArea = 100000 #im_bw.shape[0] * im_bw.shape[1] # max limit: image size
# Create a detector with the parameters
ver = (cv2.__version__).split('.')
if int(ver[0]) < 3 :
detector = cv2.SimpleBlobDetector(params)
else :
detector = cv2.SimpleBlobDetector_create(params)
# Detect blobs.
keypoints = detector.detect(im_bw)
print "Found", len(keypoints), "blobs:"
for kpt in keypoints:
print "(%.1f, %.1f) diameter: %.1f" % (kpt.pt[0], kpt.pt[1], kpt.size)
# Draw detected blobs as red circles.
# cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS ensures the size of the
# circle corresponds to the size of blob
im_with_keypoints = cv2.drawKeypoints(gimg, keypoints, np.array([]), (0,0,255),
cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
# Show keypoints
cv2.imshow("Keypoints", im_with_keypoints)
cv2.waitKey(0)
This algorithm finds the coordinate (454, 377) as the center of the blob, but if you reduce the minArea to e.g. 10 then it will find the number 3 in the bottom corner as well.
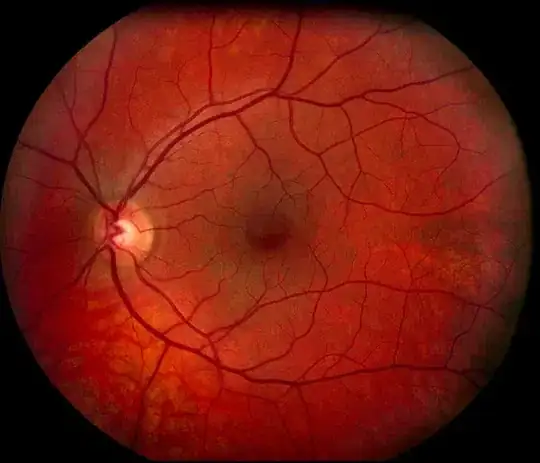 test2.jpg
test2.jpg
{kind=link}