Interesting task :) Here is my solution:

Here is code:
#include <iostream>
#include <vector>
#include <stdio.h>
#include <stdarg.h>
#include <set>
#include "opencv2/opencv.hpp"
#include "fstream"
#include "iostream"
using namespace std;
using namespace cv;
int Thinning(unsigned char * ucBinedImg, unsigned char * ucThinnedImage, long lWidth, long lHeight, long lIterativeLimit)
{
if(ucBinedImg == NULL)
return -1;
if(ucThinnedImage == NULL)
return -2;
if(lIterativeLimit == -1)
lIterativeLimit = 60000;
unsigned char x1, x2, x3, x4, x5, x6, x7, x8, xp;
unsigned char g1, g2, g3, g4;
unsigned char b1, b2, b3, b4;
unsigned char np1, np2, npm;
unsigned char *pUp, *pDown, *pImg;
long lDeletedPoints = 0;
// set border
memcpy(ucThinnedImage, ucBinedImg, lWidth*lHeight);
for(long it=0; it<lIterativeLimit; it++)
{
lDeletedPoints = 0;
for(long i=1; i<lHeight-1; i++)
{
// init neighborhood
pUp = ucBinedImg + (i-1)*lWidth;
pImg = ucBinedImg + i*lWidth ;
pDown = ucBinedImg + (i+1)*lWidth ;
for( long j=1; j<lWidth-1; j++)
{
pUp++;
pImg++;
pDown++;
if(!*pImg)
continue;
x6 = *(pUp-1);
x5 = *(pImg-1);
x4 = *(pDown-1);
x7 = *pUp;
xp = *pImg;
x3 = *pDown;
x8 = *(pUp+1);
x1 = *(pImg + 1);
x2 = *(pDown + 1);
b1 = !x1 && (x2 == 1 || x3 == 1);
b2 = !x3 && (x4 == 1 || x5 == 1);
b3 = !x5 && (x6 == 1 || x7 == 1);
b4 = !x7 && (x8 == 1 || x1 == 1);
g1 = (b1 + b2 + b3 + b4) == 1;
np1 = x1|| x2;
np1 += x3 || x4;
np1 += x5 || x6;
np1 += x7 || x8;
np2 = x2|| x3;
np2 += x4 || x5;
np2 += x6 || x7;
np2 += x8 || x1;
npm = np1>np2?np2:np1;
g2 = npm>=2 && npm<=3;
g3 = (x1 && (x2 || x3 || !x8)) == 0;
g4 = (x5 && (x6 || x7 || !x4)) == 0;
// first part
if(g1 && g2 && g3)
{
// delete this point
ucThinnedImage[lWidth*i + j] = 0;
++lDeletedPoints;
}
}
}
//syn
memcpy(ucBinedImg, ucThinnedImage, lWidth*lHeight);
for(long i=1; i<lHeight-1; i++)
{
// init neighborhood
pUp = ucBinedImg + (i-1)*lWidth;
pImg = ucBinedImg + i*lWidth ;
pDown = ucBinedImg + (i+1)*lWidth ;
for( long j=1; j<lWidth-1; j++)
{
pUp++;
pImg++;
pDown++;
if(!*pImg)
continue;
x6 = *(pUp-1);
x5 = *(pImg-1);
x4 = *(pDown-1);
x7 = *pUp;
xp = *pImg;
x3 = *pDown;
x8 = *(pUp+1);
x1 = *(pImg + 1);
x2 = *(pDown + 1);
b1 = !x1 && (x2 == 1 || x3 == 1);
b2 = !x3 && (x4 == 1 || x5 == 1);
b3 = !x5 && (x6 == 1 || x7 == 1);
b4 = !x7 && (x8 == 1 || x1 == 1);
g1 = (b1 + b2 + b3 + b4) == 1;
np1 = x1|| x2;
np1 += x3 || x4;
np1 += x5 || x6;
np1 += x7 || x8;
np2 = x2|| x3;
np2 += x4 || x5;
np2 += x6 || x7;
np2 += x8 || x1;
npm = np1>np2?np2:np1;
g2 = npm>=2 && npm<=3;
g3 = (x1 && (x2 || x3 || !x8)) == 0;
g4 = (x5 && (x6 || x7 || !x4)) == 0;
// second part
if(g1 && g2 && g4)
{
// delete this point
ucThinnedImage[lWidth*i + j] = 0;
++lDeletedPoints;
}
}
}
//syn
memcpy(ucBinedImg, ucThinnedImage, lWidth*lHeight);
// if no points to be deleted
if(lDeletedPoints == 0)
break;
}
// clear edge bar
for(long i=0; i<lHeight; i++)
{
for(long j=0; j<lWidth; j++)
{
if(i<16)
ucThinnedImage[i*lWidth+j] = 0;
else if(i>=lHeight-16)
ucThinnedImage[i*lWidth+j] = 0;
else if(j<16)
ucThinnedImage[i*lWidth+j] = 0;
else if(j>=lWidth-16)
ucThinnedImage[i*lWidth+j] = 0;
}
}
return 0;
}
void Thinning(Mat& src,Mat& dst,long IterativeLimit=-1)
{
Mat bin_img=src&1;
if(!dst.empty()){dst.release();}
dst=Mat::zeros(src.size(),CV_8UC1);
Thinning(bin_img.data,dst.data,bin_img.cols,bin_img.rows,IterativeLimit);
dst*=255;
}
int main(int argc, char* argv[])
{
namedWindow("source");
namedWindow("result");
Mat img=imread("raw_image.jpg",0);
cv::threshold(img,img,128,255,cv::THRESH_BINARY);
int erosion_size=5;
Mat element = getStructuringElement( cv::MORPH_ELLIPSE,Size( 2*erosion_size + 1, 2*erosion_size+1 ),Point( erosion_size, erosion_size ) );
cv::dilate(img,img,element);
Mat thinned;
Thinning(img,thinned);
vector<Vec2f> lines;
HoughLines(thinned, lines, 0.5, CV_PI/360, 50, 0, 0 );
float hist_theta[2]={0,0};
float hist_rho[2]={0,0};
float n[2]={0,0};
for( size_t i = 0; i < lines.size(); i++ )
{
float rho = lines[i][0], theta = lines[i][1];
if(fabs(theta-CV_PI/2)<CV_PI/4)
{
hist_theta[0]+=theta;
hist_rho[0]+=rho;
n[0]+=1;
}else
{
hist_theta[1]+=theta;
hist_rho[1]+=rho;
n[1]+=1;
}
}
for( size_t i = 0; i < 2; i++ )
{
float rho = hist_rho[i]/n[i], theta = hist_theta[i]/n[i];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000*(-b));
pt1.y = cvRound(y0 + 1000*(a));
pt2.x = cvRound(x0 - 1000*(-b));
pt2.y = cvRound(y0 - 1000*(a));
line( thinned, pt1, pt2, Scalar(255,255,255), 1, CV_AA);
}
imshow("source",img);
imshow("result",thinned);
cv::waitKey(0);
}
Here is a hack in this source it uses two 1D histograms for postprocessing. In real life application it should use 2D histogram for close lines averaging.
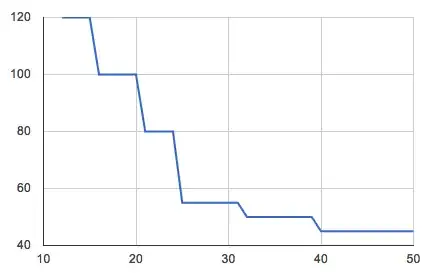
 you can see that there is a local ridge maximum in the middle of the lines.
you can see that there is a local ridge maximum in the middle of the lines.