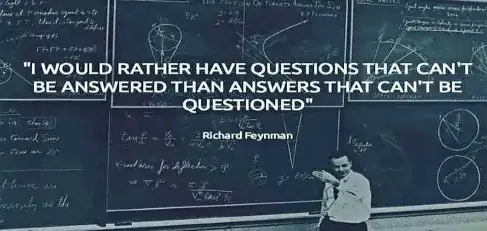
I have graph like one in Figure 1 (the first image) and want to connect the red nodes to have cycle, but cycles do not have to be Hamiltonian like Figure 2 and Figure 3 (the last two images). The problem has much bigger search space than TSP since we can visit a node twice. Like the TSP, it is impossible to evaluate all the combinations in a large graph and I should try heuristic, but the problem is that, unlike the TSP, the length of cycles or tours is not fixed here. Because, visiting all the blue nodes is not mandatory and this cause having variable length including some of the blue nodes. How can I generate a possible "valid" combination every time for evaluation? I mean, a cycle can be {A, e, B, l, k, j, D, j, k, C, g, f, e} or {A, e, B, l, k, j, D, j, i, h , g, C, g, f, e}, but not {A, e, B, l, k, C, g, f, e} or {A, B, k, C, i, D}.
{kind=link}
{kind=link}
{kind=link}
Update: The final goal is to evaluate which cycle is optimal/near optimal considering length and risk (see below). So I am not only going to minimize the length but minimizing the risk as well. This cause not being able to evaluate risk of cycle unless you know all its nodes sequence. Hope this clarifies why I can not evaluate new cycle at the middle of its generating process. We can:
- generate and evaluate possible cycles one by one;
- or generate all possible cycles and then do their evaluation.
Definition of the risk: Assume cycle is a ring which connects primary node (one of the red nodes) to all other red nodes. In case of failure in any part (edge) of the ring, no red nodes should be disconnected form the primary node (this is desired). However there are some edges we have to pass twice (due to not having Hamiltonian cycle which connects all the red nodes) and in case of failure in those edges, some of red nodes may be totally disconnected. So risk of cycle is summation of the length of risky edges (we have twice in our ring/tour) multiplied by number of red nodes we lose in case of cutting each risky edge.
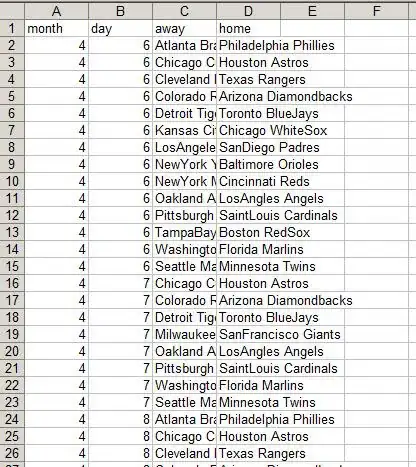
A real example of 3D graph I am working on including 5 red nodes and 95 blue nodes is in below:

And here is link to Excel sheet containing adjacency matrix of the above graph (the first five nodes are red and the rests are blue).