Solution 1:
Here is a complete solution written in python 2.7.x using OpenCV 2.4 and Sympy.
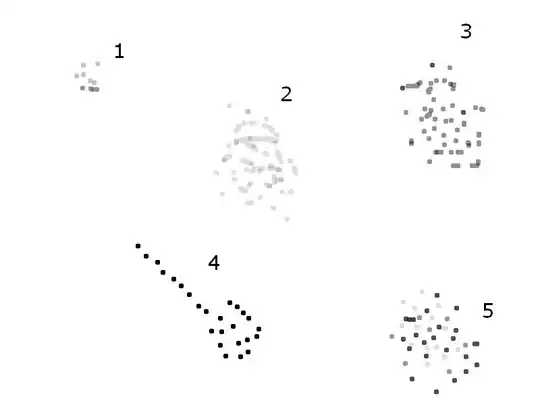
I used the data (line segments) from D.Noakes, but I took a different approach.
Problem definition:
For a set of line segments, find all the possible quadrilateral shapes where the segments fit inside the edges of the quad.
Method:
- Group the line segments into approximately "horizontal" or "vertical".
- Make pairs of "horizontal" or "vertical".
- Filter pairs e.g. if they are touching or intersecting.
- Make combinations of two "horizontal" and two "vertical" segments.
- Filter candidate quads e.g. if corners are outside image or segments are not on the quad.
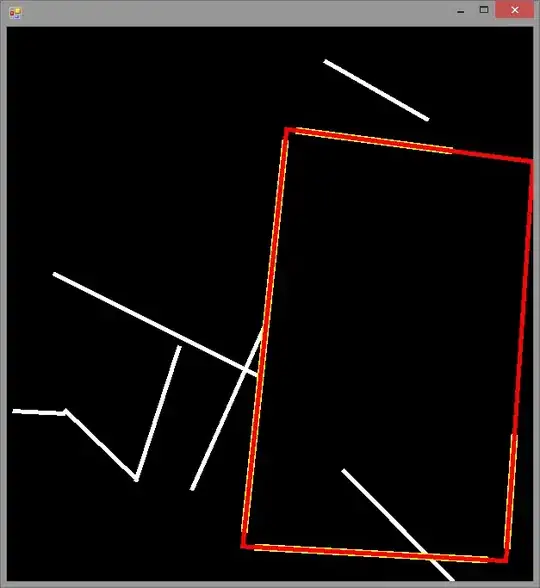
Result:
This method detects 4 quadrilateral shapes in the image
See animated GIF: https://ibb.co/4Rv9rJW
Code: https://pastiebin.com/5f3836269f7e5
#!/usr/bin/env python
"""
Find Quads:
For a set of line segments, find all the possible
quadrilateral shapes where the segments fit
inside the edges of the quad.
Dependencies:
Sympy is used for geometry primitives.
sudo pip install sympy
"""
import numpy as np
import cv2
import itertools # combinations, product
from sympy import Point, Line, Segment, convex_hull
import sys
input_image = cv2.imread("detected_lines.jpg")
#------------------------------------------------------------------------------#
def checkPointInImage(point, image_width, image_height):
"""
Check if a Sympy Point2D is within the bounds of an OpenCV image.
"""
pt_x = int(round(point.x))
pt_y = int(round(point.y))
if (pt_x >= 0) and (pt_x < image_width) and (pt_y >= 0) and (pt_y < image_height):
return True
# Point is outside the image boundary
return False
def checkPointsInImage(points, image_width, image_height):
"""
Check if a set of Sympy Point2D are all within the bounds of an OpenCV image.
"""
for point in points:
if not checkPointInImage(point, image_width, image_height):
return False
# All points are within the image boundary
return True
def getUniquePairs(segments, image_dims):
"""
Get all the possible pairs of line segments.
(the unique combinations of 2 lines)
Note: this doesn't check for duplicate elements, it works
only on the position in the list.
"""
# Check that a pair of segments are not intersecting
check_segments_dont_intersect = True
# Check that the endpoint of one segment
# does not touch the other segment (within 10 pixels)
check_segment_endpoints = True
endpoint_min_separation = 10
# Project the segments and check if the intersection
# point is within the image
check_projected_segments_dont_intersect = True
pairs = list(itertools.combinations(segments, 2)) # a list of tuple
image_width, image_height = image_dims
filtered_pairs = []
for pair in pairs:
segment1 = pair[0]
segment2 = pair[1]
if check_segments_dont_intersect:
if bool(len(segment1.intersection(segment2))):
# Discard this pair.
# The pair of segments intersect each other.
continue
if check_segment_endpoints or check_projected_segments_dont_intersect:
line1 = Line(segment1)
line2 = Line(segment2)
intersection_points = line1.intersection(line2)
intersects = bool(len(intersection_points))
if intersects:
intersection_point = intersection_points[0]
if check_segment_endpoints:
# Measure the distance from the endpoint of each segment
# to the intersection point.
d1 = float(segment1.points[0].distance(intersection_point))
d2 = float(segment1.points[1].distance(intersection_point))
d3 = float(segment2.points[0].distance(intersection_point))
d4 = float(segment2.points[1].distance(intersection_point))
d = np.array([d1,d2,d3,d4])
if (d < float(endpoint_min_separation)).any():
# Discard this pair.
# One segment is (almost) touching the other.
continue
if check_projected_segments_dont_intersect:
if checkPointInImage(intersection_point, image_width, image_height):
# Discard this pair.
# After projecting the segments as lines,
# they intersect somewhere on the image.
continue
filtered_pairs.append(pair)
return filtered_pairs
def getCombinationsOfTwoLists(list1, list2):
"""
For two sets of Line Segment pairs,
generate all possible combinations.
"""
return list(itertools.product(list1, list2))
def getIntersectionLineSegments(segment1, segment2):
"""
Find the intersection of two line segments,
by extending them into infinite lines.
"""
line1 = Line(segment1)
line2 = Line(segment2)
intersection_points = line1.intersection(line2)
intersects = bool(len(intersection_points))
if intersects:
intersection_point = intersection_points[0]
return intersection_point
# Error, lines do not intersect
print("WARNING: Horizontal and vertical line segments do not intersect.")
print("This should not happen!")
return None
def checkLineSegmentIsAbove(segment1, segment2):
"""
Check if one line segment is above the other.
(this assumes the segments are not intersecting)
"""
# In image coordinates, (+x,+y) is bottom-right corner.
if (segment1.points[0].y > segment2.points[0].y): return False
if (segment1.points[0].y > segment2.points[1].y): return False
if (segment1.points[1].y > segment2.points[0].y): return False
if (segment1.points[1].y > segment2.points[1].y): return False
return True
def checkLineSegmentOnLeft(segment1, segment2):
"""
Check if one line segment is on the left side of the other.
(this assumes the segments are not intersecting)
"""
# In image coordinates, (+x,+y) is bottom-right corner.
if (segment1.points[0].x > segment2.points[0].x): return False
if (segment1.points[0].x > segment2.points[1].x): return False
if (segment1.points[1].x > segment2.points[0].x): return False
if (segment1.points[1].x > segment2.points[1].x): return False
return True
def getConvexIntersectionPoints_method2(horizontal_segment1, horizontal_segment2, vertical_segment1, vertical_segment2):
"""
For two pairs of line segments, treat them as
infinite lines and find the intersection points.
These 4 points are in a clockwise order that
represents a convex quadrilateral.
"""
# Sort the segments in clockwise order
top_segment = None
right_segment = None
bottom_segment = None
left_segment = None
if checkLineSegmentIsAbove(horizontal_segment1, horizontal_segment2):
top_segment = horizontal_segment1
bottom_segment = horizontal_segment2
else:
top_segment = horizontal_segment2
bottom_segment = horizontal_segment1
if checkLineSegmentOnLeft(vertical_segment1, vertical_segment2):
left_segment = vertical_segment1
right_segment = vertical_segment2
else:
left_segment = vertical_segment2
right_segment = vertical_segment1
corner_pt1 = getIntersectionLineSegments(left_segment, top_segment)
corner_pt2 = getIntersectionLineSegments(top_segment, right_segment)
corner_pt3 = getIntersectionLineSegments(right_segment, bottom_segment)
corner_pt4 = getIntersectionLineSegments(bottom_segment, left_segment)
quad_points = [corner_pt1, corner_pt2, corner_pt3, corner_pt4]
sorted_segments = [top_segment, right_segment, bottom_segment, left_segment]
return (quad_points, sorted_segments)
def checkSegmentsOnQuad_method2(sorted_segments, corners):
"""
Check if all 4 line segments are within
the edges of a quadrilateral.
This assumes that the inputs are already matched.
"""
if (len(sorted_segments) != 4) or (len(corners) != 4):
print("ERROR: Expected 4 segments and 4 corners in checkSegmentsOnQuad_method2()")
sys.exit()
# Get the 4 edges
edges = []
for i in range(3):
p1 = corners[i]
p2 = corners[i+1]
edges.append(Segment(p1, p2))
p1 = corners[3]
p2 = corners[0]
edges.append(Segment(p1, p2))
for i in range(4):
if not edges[i].contains(sorted_segments[i]):
return False
return True
def getQuads(sets_of_four_segments, image_dims):
"""
Find quadrilateral shapes.
"""
image_width, image_height = image_dims
quads = []
for i in range(len(sets_of_four_segments)):
# Determine if 4 line segments represent
# a valid quadrilateral shape:
segments = sets_of_four_segments[i]
horizontal_segment1 = segments[0][0]
horizontal_segment2 = segments[0][1]
vertical_segment1 = segments[1][0]
vertical_segment2 = segments[1][1]
quad_points, sorted_segments = getConvexIntersectionPoints_method2(horizontal_segment1, horizontal_segment2, vertical_segment1, vertical_segment2)
if not checkPointsInImage(quad_points, image_width, image_height):
print(" Bad quad, an intersection point (one corner of the quad) is outside image!")
# Save debug image
img = np.copy(input_image)
drawCrosshairs(img, quad_points)
drawQuad(img, quad_points)
suffix = str(i).zfill(2)
cv2.imwrite("candidate_quad_"+suffix+".jpg", img)
# Discard this quad.
# A corner point is outside the image boundary.
continue
# Check if each line segment is within one side of the quad.
# - The segments can not intersect each other.
# - The end of a segment can not extend out past the quad.
# - All segments must be contained within one edge of the shape.
if checkSegmentsOnQuad_method2(sorted_segments, quad_points):
print(" Good")
quads.append(quad_points)
else:
print(" Bad quad, a line segment is not within the quad")
# Save debug image
img = np.copy(input_image)
drawCrosshairs(img, quad_points)
drawQuad(img, quad_points)
suffix = str(i).zfill(2)
cv2.imwrite("candidate_quad_"+suffix+".jpg", img)
#cv2.imshow("Quad corners", img)
#cv2.waitKey()
return quads
#------------------------------------------------------------------------------#
# Drawing functions:
def drawSegment(image, segment, color):
"""
Draw a Sympy Line Segment on an OpenCV image.
"""
thickness = 2
x1 = int(segment.points[0].x) # should already be int
y1 = int(segment.points[0].y)
x2 = int(segment.points[1].x)
y2 = int(segment.points[1].y)
cv2.line(image, (x1,y1), (x2,y2), color, thickness)
def drawSegments(image, segments, color=(0,0,255)):
"""
Draw lines on an OpenCV image.
Default color is red.
"""
for segment in segments:
drawSegment(image, segment, color)
def drawCrosshair(image, point):
"""
Draw a Sympy Point2D on an OpenCV image
with a cross marker.
"""
pt_x = int(round(point.x))
pt_y = int(round(point.y))
length = 5
thickness = 2
color = (255,0,255) # magenta
cv2.line(image, (pt_x, pt_y-length), (pt_x, pt_y+length), color, thickness)
cv2.line(image, (pt_x-length, pt_y), (pt_x+length, pt_y), color, thickness)
def drawCrosshairs(image, points):
"""
Draw marks on an OpenCV image.
"""
for point in points:
drawCrosshair(image, point)
def drawQuad(image, corners, color=(0,255,0)):
"""
Draw a quadrilateral shape.
The 4 corner points are Sympy Point2D.
"""
for i in range(len(corners)-1):
p1 = corners[i]
p2 = corners[i+1]
segment = Segment(p1, p2)
drawSegment(image, segment, color)
# Close the polygon
p1 = corners[len(corners)-1]
p2 = corners[0]
segment = Segment(p1, p2)
drawSegment(image, segment, color)
#------------------------------------------------------------------------------#
if input_image == None:
print("ERROR: Can't find input image")
sys.exit()
#cv2.imshow("input_image", input_image)
#cv2.waitKey()
# Line segments sample data
segment1 = Segment(Point(335,120), Point(517,144))
segment2 = Segment(Point(287, 604), Point(558, 619))
segment3 = Segment(Point(323, 131), Point(275, 587))
segment4 = Segment(Point(589, 473), Point(580, 606))
segment5 = Segment(Point(368, 39), Point(489, 108))
segment6 = Segment(Point(53, 286), Point(293, 406))
segment7 = Segment(Point(299, 347), Point(214, 538))
segment8 = Segment(Point(200, 370), Point(149, 528))
segment9 = Segment(Point(6, 446), Point(68, 449))
segment10 = Segment(Point(66, 444), Point(150, 525))
segment11 = Segment(Point(389, 514), Point(518, 644))
segments = [segment1, segment2, segment3, segment4, segment5, segment6, segment7, segment8, segment9, segment10, segment11]
image_width = input_image.shape[1]
image_height = input_image.shape[0]
image_dims = (image_width, image_height)
input_image_with_segments = np.copy(input_image)
drawSegments(input_image_with_segments, segments)
cv2.imshow("input_image_with_segments", input_image_with_segments)
cv2.waitKey()
# Sort the line segments into 2 groups:
horizontal_segments = []
vertical_segments = []
image_width = input_image.shape[1]
x_axis = Line((0, 0), (image_width, 0))
for segment in segments:
# Compute the angle of each line segment.
# Angle is w.r.t. the top edge of the image
# in a clockwise direction.
angle = float(x_axis.angle_between(segment))
# Check 315 to 360 degrees
if (angle >= 2.0*np.pi-np.pi/4.0) and (angle <= 2.0*np.pi):
horizontal_segments.append(segment)
# Check 0 to 45 degrees
elif (angle >= 0.0) and (angle < np.pi/4.0):
horizontal_segments.append(segment)
# Check 135 to 225 degrees
elif (angle > np.pi-np.pi/4.0) and (angle < np.pi+np.pi/4.0):
horizontal_segments.append(segment)
else:
vertical_segments.append(segment)
# Save debug images
input_image_with_horizontal_segments = np.copy(input_image)
drawSegments(input_image_with_horizontal_segments, horizontal_segments)
cv2.imwrite("segments_horizontal.jpg", input_image_with_horizontal_segments)
input_image_with_vertical_segments = np.copy(input_image)
drawSegments(input_image_with_vertical_segments, vertical_segments)
cv2.imwrite("segments_vertical.jpg", input_image_with_vertical_segments)
# Get all the possible pairs of horizontal line segments:
pairs_of_horizontal_line_segments = getUniquePairs(horizontal_segments, image_dims)
print("Got %d pairs of horizontal line segments" % len(pairs_of_horizontal_line_segments)) # 15 pairs, 10 after filtering
# Get all the pairs of vertical line segments:
pairs_of_vertical_line_segments = getUniquePairs(vertical_segments, image_dims)
print("Got %d pairs of vertical line segments" % len(pairs_of_vertical_line_segments)) # 10 pairs, 6 after filtering
# Save debug images
for i in range(len(pairs_of_horizontal_line_segments)):
pair = pairs_of_horizontal_line_segments[i]
segments = [pair[0], pair[1]]
img = np.copy(input_image)
drawSegments(img, segments)
suffix = str(i).zfill(2)
cv2.imwrite("segment_pairs_horizontal_"+suffix+".jpg", img)
#cv2.imshow("Pair of segments", img)
#cv2.waitKey()
for i in range(len(pairs_of_vertical_line_segments)):
pair = pairs_of_vertical_line_segments[i]
segments = [pair[0], pair[1]]
img = np.copy(input_image)
drawSegments(img, segments)
suffix = str(i).zfill(2)
cv2.imwrite("segment_pairs_vertical_"+suffix+".jpg", img)
#cv2.imshow("Pair of segments", img)
#cv2.waitKey()
# Get all combinations of 4 line segments:
sets_of_four_line_segments = getCombinationsOfTwoLists(pairs_of_horizontal_line_segments, pairs_of_vertical_line_segments)
print("Got %d potential quadrilaterals" % len(sets_of_four_line_segments)) # = 60
# Find the valid quadrilateral shapes:
quads = getQuads(sets_of_four_line_segments, image_dims)
print("Got %d valid quads" % len(quads))
for i in range(len(quads)):
img = np.copy(input_image)
drawQuad(img, quads[i])
# Save result images
suffix = str(i).zfill(2)
cv2.imwrite("quad_"+suffix+".jpg", img)
title = "Candidate Quad " + str(i)
cv2.imshow(title, img)
cv2.waitKey()