[EDIT 21/5/2013: As pointed out by Gene in a comment, my weighting scheme actually does not guarantee that every rectangle will be reachable from every other rectangle -- only that every rectangle will be connected to some other rectangle in each direction.]
A nice way to do this is using maximum weighted bipartite matching.
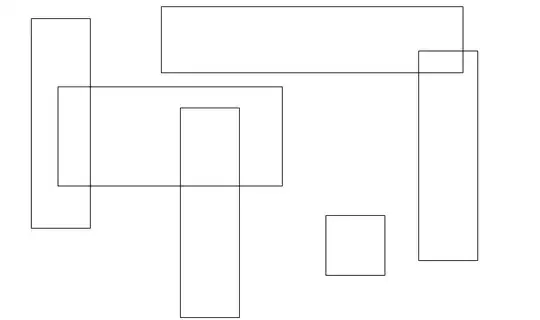
What we want to do is build a table defining a function f(r, d) that returns the rectangle that the user will be moved to if they are currently at rectangle r and hit direction d (up, down, left or right). We would like this function to have some nice properties, such as:
- It must be possible to reach every rectangle from every other rectangle
- Pressing left then right or vice versa, or up then down or vice versa, should leave the user in the same place
- Pressing e.g. left should take the user to a rectangle to the left (this is a bit more difficult to state precisely, but we can use a scoring system to measure the quality)
For each rectangle, create 4 vertices in a graph: one for each possible key that could be pressed while at that rectangle. For a particular rectangle r, call them rU, rD, rL and rR. For every pair of rectangles r and s, create 4 edges:
- (rU, sD)
- (rD, sU)
- (rL, sR)
- (rR, sL)
This graph has 2 connected components: one contains all U and D vertices, and the other contains all L and R vertices. Each component is bipartite, because e.g. no U vertex is ever connected to another U vertex. We could in fact run maximum weighted bipartite matching on each component separately, although it's easier just to talk about running it once on the entire graph after grouping, say, U vertices with L vertices and D vertices with R vertices.
Assign each of these edges a nonnegative weight according to how much sense it makes for that pair of rectangles to be connected by that pair of keys. You are free to choose the form for this scoring function, but it should probably be:
- inversely proportional to the distances between the rectangles (you could use the distance between their centres), and
- inversely proportional to how far the angle between the centres of the rectangles differs from the desired horizontal or vertical line, and
- zero whenever the rectangles are oriented the wrong way (e.g. if for the edge (rU, sD) if the centre of r is actually above the centre of s). Alternatively, you can just delete these zero-weight edges.
This function attempts to satisfy requirement 3 at the top.
[EDIT #2 24/5/2013: Added an example function below.]
Here is C-ish pseudocode for an example function satisfying these properties. It takes the centre points of 2 rectangles and the direction from rectangle 1 (the direction from rectangle 2 is always the opposite of this direction):
const double MAXDISTSQUARED = /* The maximum possible squared distance */;
const double Z = /* A +ve number. Z > 1 => distance more important than angle */
// Return a weight in the range [0, 1], with higher indicating a better fit.
double getWeight(enum direction d, int x1, int y1, int x2, int y2) {
if (d == LEFT && x1 < x2 ||
d == RIGHT && x1 > x2 ||
d == UP && y1 < y2 ||
d == DOWN && y1 > y2) return 0;
// Don't need to take sqrt(); in fact it's probably better not to
double distSquared = (x1 - x2) * (x1 - x2) + (y1 - y2) * (y1 - y2);
double angle = abs(atan2(x1 - x2, y1 - y2)); // 0 => horiz; PI/2 => vert
if (d == UP || d == DOWN) angle = PI / 2 - angle;
return 1 - pow(distSquared / MAXDISTSQUARED, Z) * (2 * angle / PI);
}
Now run maximum weighted bipartite matching. This will attempt to find the set of edges having highest total weight such that every vertex (or at least as many as possible) are adjacent to a selected edge, but no vertex is adjacent to more than one edge. (If we allowed a vertex to be adjacent to more than one edge, it would mean that pressing that key while at that rectangle would take you to more than one destination rectangle, which doesn't make sense.) Each edge in this matching corresponds to a bidirectional pair of keypresses, so that pressing e.g. up and then down will take to back to where you were, automatically satisfying requirement 2 at the top.
The only requirement not automatically satisfied by this approach so far is the important one, number 1: it does not necessarily guarantee that every rectangle will be reachable. If we just use the "raw" quality scores as edge weights, then this can actually occur for certain configurations, e.g. when there is one rectangle in each of the 4 corners of the screen, plus one at the centre, the centre one might be unreachable.
[EDIT 21/5/2013: As Gene says, my claim below that property 1 is satisfied by the new weighting scheme I propose is wrong. In many cases every rectangle will be reachable, but in general, you need to solve the NP-hard Hamiltonian Cycle problem to guarantee this. I'll leave the explanation in as it gets us some of the way there. In any case it can be hacked around by adjusting weights between connected components upward whenever subcycles are detected.]
In order to guarantee that the matching algorithm always returns a matching in which every rectangle is reachable, we need to adjust the edge weights so that it is never possible for a matching to score higher than a matching with more edges. This can be achieved by scaling the scoring function to between 0 and 1, and adding the number of rectangles, n, to each edge's weight. This works because a full matching then has score at least 4n^2 (i.e. even if the quality score is 0, the edge itself has a weight of n and there are 4n of them), while any matching with fewer edges has score at most 4(n-1)(n+1) = 4n^2 - 4, which is strictly less.