Disclaimer: If you are trying to pack multiple polygons inside a bigger polygon then I think, this problem is NP hard so it is unlikely that an efficient and exact algorithm can be developed to solve this problem. The polygon can continuously translate and rotate in a plane, which means the placements may be infinite and this makes the solution space of the problem also infinite. If you are just trying to find if the smaller polygon can fit inside the bigger one, I am short of an efficient answer, but as you have asked - "Any leads would be appreciated" - here is one.
Let the bigger polygon be B and smaller polygon (the one to be inserted) is S. B has a total of b points and S has a total of s points.
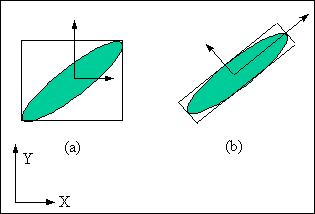
The image below shows a Bounding Box and a Minimum Bounding Rectangle. We use this to get the Fast Fail Filter (very simple idea... defined in next para). The box (a) shown below is faster to compute while box (b) is more accurate for filtering. Draw that box which gives better return on investment for your case. Though in the figure below they both are bounding an ellipse instead of a polygon but you get the idea.

(Image taken from: http://portal.ku.edu.tr/~cbasdogan/Tutorials/imageU21.JPG)
Crux: If any line of B intersects with any line of S, or if all lines of S are outside B, B cannot take S in.
Fast fail filter: Get the bounding rectangles of B and S. If you are not able to place the bounding rectangle of S inside the bounding rectangle of B, then you cannot place the polygon S inside polygon B. This way you fail faster if there is no chance of B to enclose S. Following image illustrates the three cases.

(Image taken from: http://www.cs.berkeley.edu/~ug/slide/pipeline/assignments/as4/figures/boundcull.gif)
Preprocessing: Determine the equation of lines that form B. Store them in a HashMap<<Point, Point>, Line> for a step that will be done later. You can uniquely define the line by slope m and intercept c and the end points of your line are going to be the key (<Point, Point>) of the HashMap.
The Algorithm:
For every S which has passed the above filter:
- Read the points of S and determine the lines that form S
- For every line of S, see if it intersects with any line of B† (they are stored in the HashMap already)
- If there is no intersection, S is inside B and all you have to do is just draw the lines without any worry of intersection.
In the worst case, the complexity of this algorithm will be O(bs) for drawing each polygon.
†This step is written brute-force to keep the algo easy to understand. Otherwise a critical optimization that will give result faster is possible here. You can filter lines of B. You need not consider a line of B for intersection with S if the endpoints of the line of B are to the left of the leftmost point of S, or to the right of the rightmost point of S or above S or below S. This can save a lot of calculations.




{kind=link}
{kind=link}
{kind=link}